Circuit-Zone.com - Electronic Projects
Posted on Wednesday, November 17, 2010 • Category: AC / DC Innveters
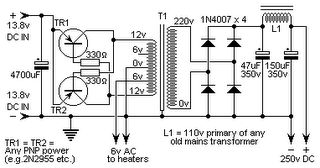
I have done a lot of work with valves in recent years. For me valves have many advantages, least of all the price; since they are now "obsolete" it is quite easy to get hold of them for next to nothing at rally's and junk sales. I recently purchased a couple of hundred battery valves for less than SEK1 (US$ 0.15) each. The biggest problem with valves is the PSU needed to provide +250 vDC and 6.3 vAC for the filaments. The transformers are no-longer available at a reasonable price, but a pair of 12v-6v-0v-6v-12v mains transformers will do the job just as well. For portable use only one transformer is required together with a pair of power transistors such as 2N3055 etc.
Posted on Monday, November 15, 2010 • Category: USB Interface Adapters
 This is simple FT232RL programming board for Arduino.
Posted on Monday, November 15, 2010 • Category: USB Interface Adapters
 One of the most common way to interface a microcontroler to a computer used to be serial port. But right now, serial port have been replaced with USB on most computers. A common way to fix this issue is to use a USB to TTL converter or a USB to RS232 converter + MAX232.
Posted on Monday, November 15, 2010 • Category: Remote Control
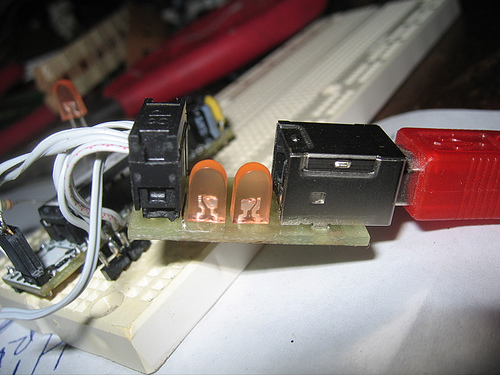
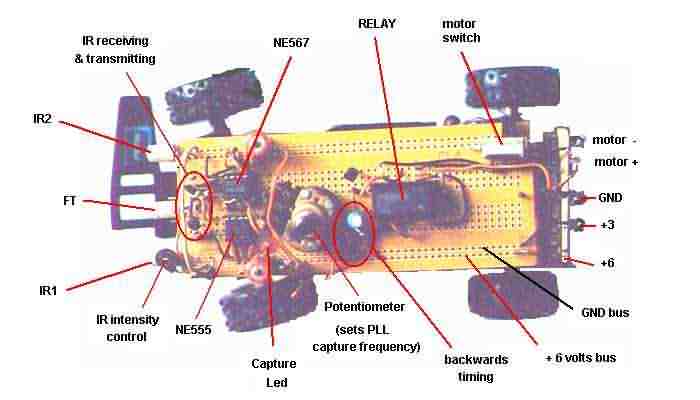 This is the project of infrared vision system for a toy car. It will project 2 modulated IR beams ahead and detect any reflection of these beams on any obstacle ahead of the car. The circuit will then invert the car's motor for a given time thus changing the direction of advance as it goes in reverse. No special control for steering is necessary as the car has the front wheels' shaft in an eccentric support: when going forward it auto aligns itself, when running backwards the shaft turns and the car describes a curve.
Posted on Monday, November 15, 2010 • Category: Miscellaneous
 LCD display consists of an array of tiny segments known as pixels that can be manipulated to present information. As a result of this technology, many types of this displays are used in applications like calculator, watch, messaging boards, clock, equipments, machines and a host of other devices that one can think of. Most of the Display types are reflective, meaning that they use only ambient light to illuminate the display. Even displays that do require an external light source consume much less power than CRT devices.
Posted on Monday, November 15, 2010 • Category: Miscellaneous
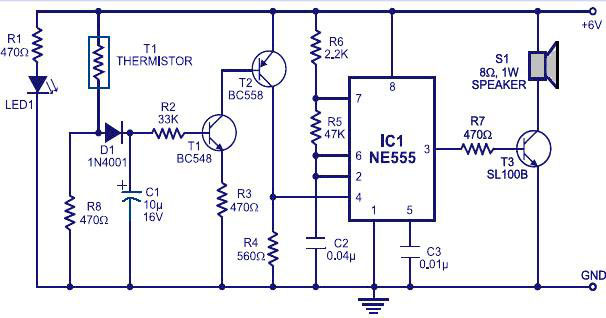 The thermistor offers a low resistance at high temperature and high resistance at low temperature. This phenomenon is employed here for sensing the fire.
The IC1 (NE555) is configured as a free running oscillator at audio frequency. The transistors T1 and T2 drive IC1. The output(pin 3) of IC1 is couples to base of transistor T3(SL100), which drives the speaker to generate alarm sound. The frequency of NE555 depends on the values of resistances R5 and R6 and capacitance C2.When thermistor becomes hot, it gives a low-resistance path for the positive voltage to the base of transistor T1 through diode D1 and resistance R2. Capacitor C1 charges up to the positive supply voltage and increases the the time for which the alarm is ON.
Posted on Monday, November 15, 2010 • Category: Antennas
 This VHF amplifier working on Band 2 Radio Spectrum tuning approximately 88 - 108 Mhz
The Preamplifier circuit uses two 2N3819 FET's in cascade configuration. The lower FET operates in common source mode, while the upper FET, operates in common gate, realizing full high frequency gain. The bottom FET is tunable allowing a peak for a particular station.
Posted on Monday, November 15, 2010 • Category: Power Supplies
 The high current regulator below uses an additional winding or a separate transformer to supply power for the LM317 regulator so that the pass transistors can operate closer to saturation and improve efficiency. For good efficiency the voltage at the collectors of the two parallel 2N3055 pass transistors should be close to the output voltage. The LM317 requires a couple extra volts on the input side, plus the emitter/base drop of the 3055s, plus whatever is lost across the (0.1 ohm) equalizing resistors (1volt at 10 amps), so a separate transformer and rectifier/filter circuit is used that is a few volts higher than the output voltage.
Posted on Monday, November 15, 2010 • Category: USB Interface Adapters
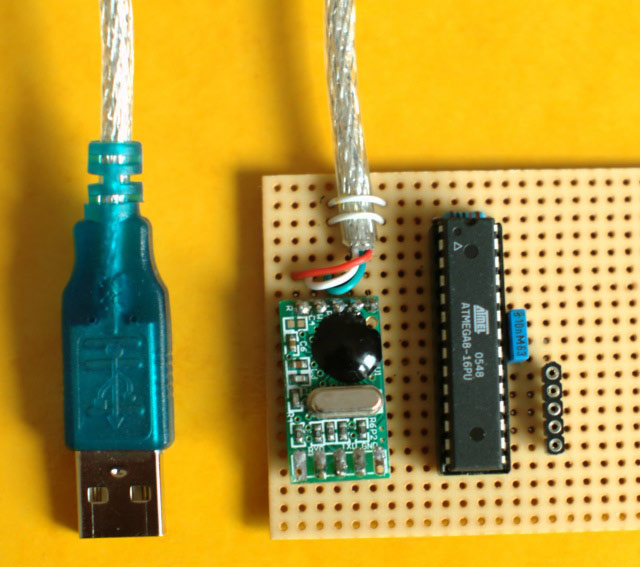
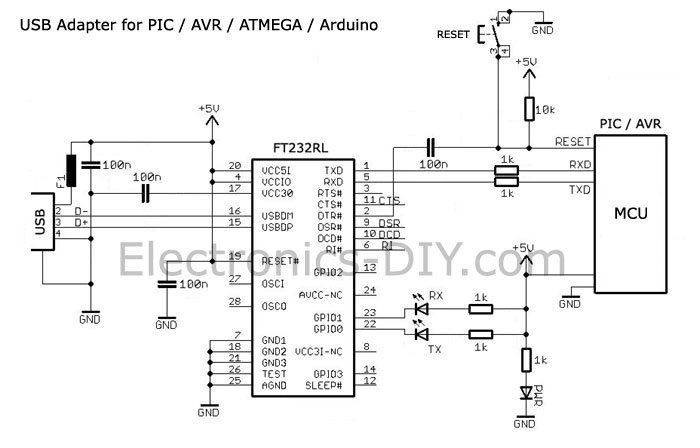 FT232RL USB to Serial UART (TTL) Adapter is a simple and inexpensive way to connect PIC, AVR or ATMEGA MCUs to a PC or Mac via USB connection. FT232RL is an impressive chip because it implements full v2.0 USB protocol, needs no external crystal, has integrated EEPROM for device ID and product description strings and comes with Royalty-Free driver support for Windows, Linux, and Mac OSX. FT232RL chip provides two data lines RXD and TXD that are connected through 1K resistors to a microcontroller such as PIC AVR ATMEGA ARDUINO. Up to 500mA of +5V power can be obtained from USB port and used to power both FT232RL chip and your favourite MCU. When connected to a PC FT232RL is mounted and shows as Virtual COM port in Device Manager making it easy to send and receive data from PIC, AVR or ATMEGA microcontrollers.
Posted on Friday, November 12, 2010 • Category: USB Interface Adapters
USB to serial interface is based on the powerful FT232 chip from FTDI. It enables very easy connection of the user's application to the PC via the USB port, without necessity of any deep knowledge about the complicated USB problems.
FT232 chip is capable to transfer data at speeds up to 1M Baud in RS232 mode and up to 3M Baud in the RS485 mode. Schematic contains the on-board serial EEPROM (93LC46) for storing the ID data (VID, PID, serial number and description strings).
Circuit-Zone.com © 2007-2025. All Rights Reserved.
|